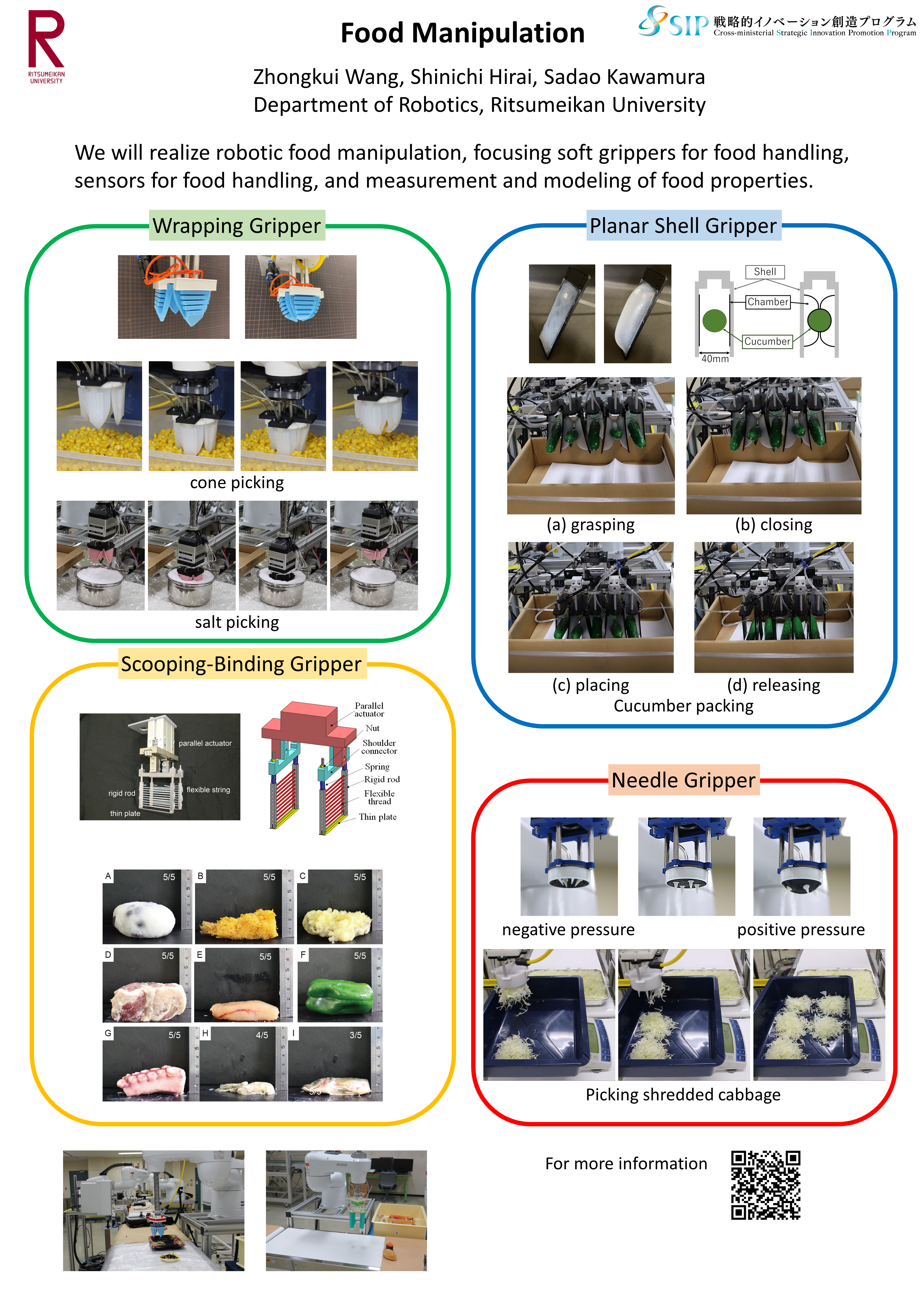
We will realize robotic food manipulation. To that end, we will conduct research on soft grippers for food handling, sensors for food handling, and measurement and modeling of food properties.
In Japan, several millions of lunch boxes are manufactured and sold per day. Currently, packing of food materials to lunch boxes is performed by human hands. Lunch box must be manufactured near the consumption area. However, due to labor shortage in recent years, automatic packing is strongly required. There is a strong demand for automatic packing of confectionery boxes and the sorting of agricultural and marine products with the recent shortage of human resources.
The reason why food handling is difficult is that many foods are soft, and the shape and properties of food materials vary much. One solution to cope to successfully perform handling despite of such variations is to introduce flexible materials such as elastomers and fibers into robot hands. In other words, by using soft materials for the physical interface between robotic hands and food materials, robotic hands will be able to absorb such variations in shape and properties.
