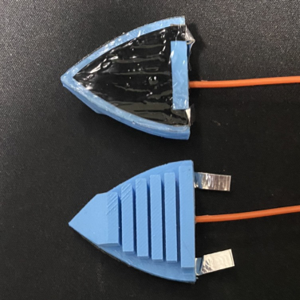
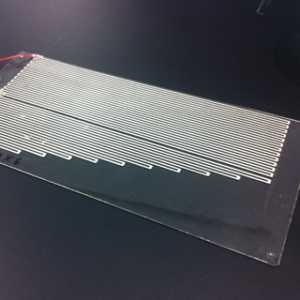
本研究の目的は,柔らかい素材で構成されるソフトセンサにより,力覚・触覚・近接覚を実現することである.導電布や導電糸,エラストマー等の柔らかい素材を用いてセンサを構成する.センサの材料や構造,センシングアルゴリズムに関する研究を進める.
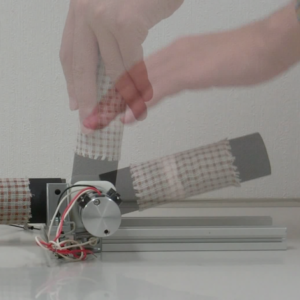
ロボットが環境と接触して作業を進めるためには,力覚や触覚,近接覚が重要である.接触領域に柔らかい材料を導入し,その材料がロボットと環境とのソフトインターフェースとして働くことにより,ロボットが環境の不確定性を吸収しながら作業を遂行することが可能になる.このようなロボットにおいては,柔らかいセンサが必要になる.そこで本研究では,ソフトインターフェースに埋め込むことが可能なソフトセンサに関する研究を進める.
https://www.ritsumei.ac.jp/se/~hirai/themes/soft-sensors-j.html