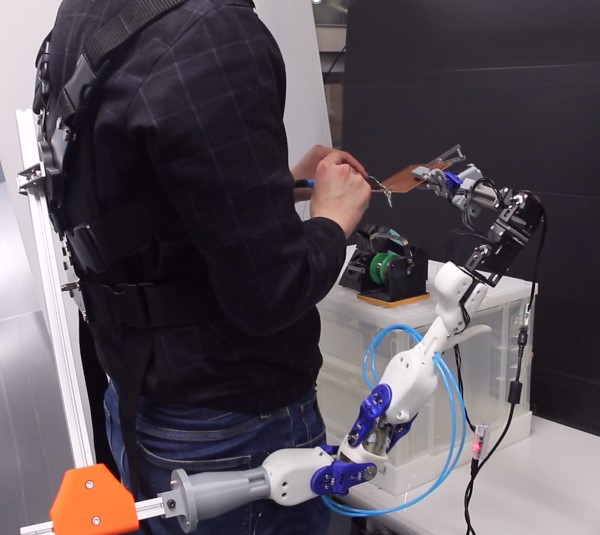
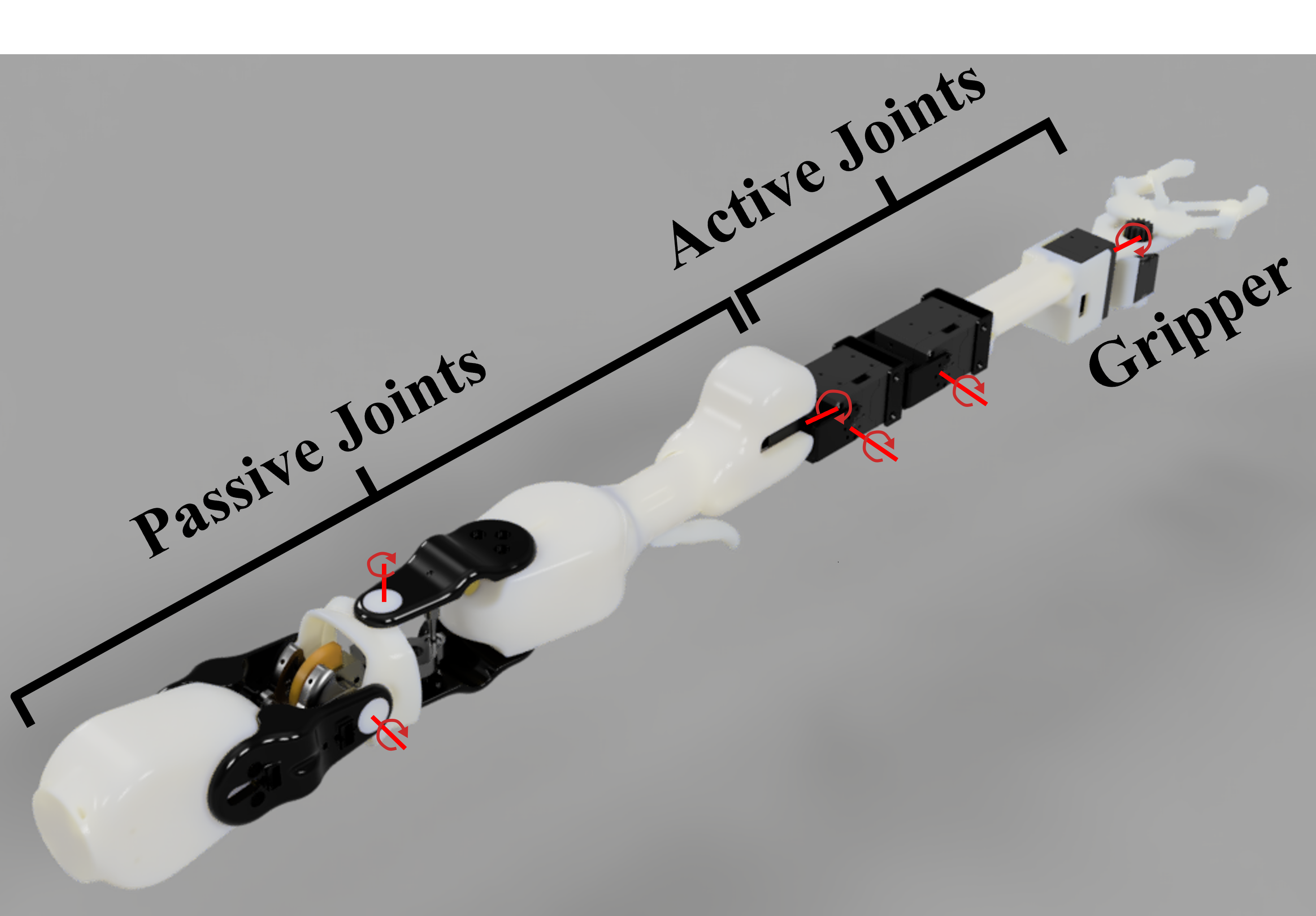
本研究は,ユーザの日常作業や工場,農作業等における作業効率の向上やユーザの作業負担を軽減することを目的に,装着者の重量負担や操作性を考慮した装着型ロボットアームの研究を行っている.従来の装着型ロボットアームは,可動範囲や自由度を向上させると,ロボットアームの根本関節に必要な保持トルクが増加するため,高重量・高出力のアクチュエータが必要となり,結果的にロボットアームの総重量が増加しユーザ負担が大きくなる.本研究は,大きな保持トルクが必要となる根本関節にアクチュエータを用いる代わりに,関節角度を物理的に固定するパッシブ関節を用いる事で,電力消費や重量軽減を図った.また,ロボットアームとしての有用性を取り入れるために,アクチュエータで関節角度制御を行うアクティブ関節を組み合わせることで,安全で軽量な装着型ロボットアームを提案した.