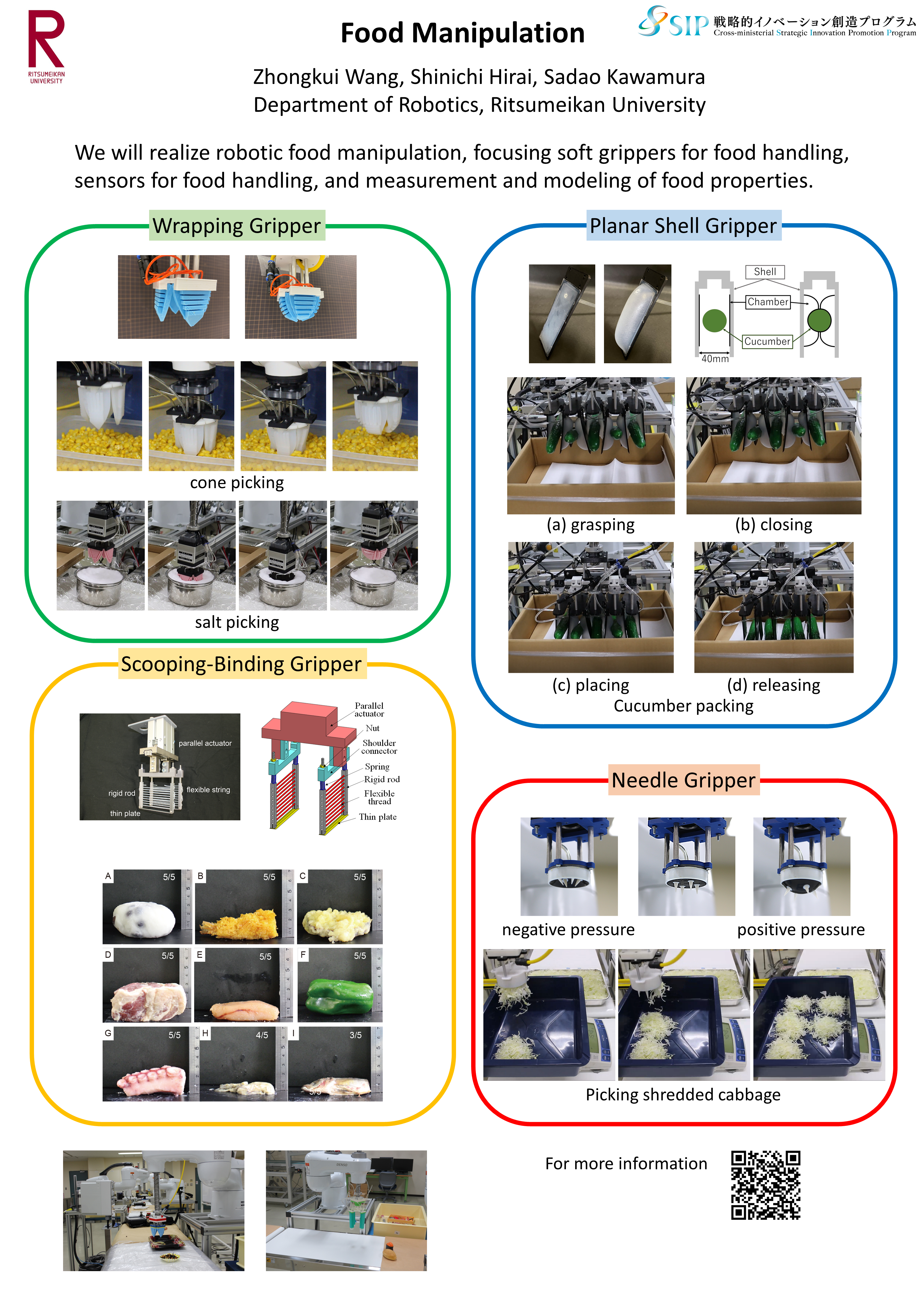
本研究の目的は,ロボットシステムによる食品マニピュレーションを実現することである.そのために,食品ハンドリング用ソフトグリッパー,ハンドリング用センサ,食品の特性計測とモデリングに関する研究を進める.
日本では,一日に数百万食の弁当が製造,販売されている.弁当への食品のパッキングは,そのほとんどを人手に頼っているのが現状である.賞味期限の観点から,弁当は消費地の近くで製造する必要がある.しかしながら,人手を確保することが近年は困難になりつつあり,パッキング作業の自動化が望まれている.また,菓子の箱への詰め込みや農水産物の仕分け等において,自動化への要望が高い.近年の人手不足に伴い,これまで人手で成されてきたハンドリング作業の自動化が必要とされている.
食品のハンドリングが困難である理由として,多くの食品が柔らかく,さらに食品の形状や特性のばらつきが大きいということが挙げられる.食品の形状や特性のばらつきに対応してハンドリングを実現する一つの方策は,エラストマーやファイバーに代表される柔軟な材料をロボットハンドに導入することである.すなわち,食品と接触する物理的インターフェース部分に柔らかい材料を用いることにより,形状や特性のばらつきが吸収されることを期待できる.
https://www.ritsumei.ac.jp/se/~hirai/themes/food-manipulation-j.html