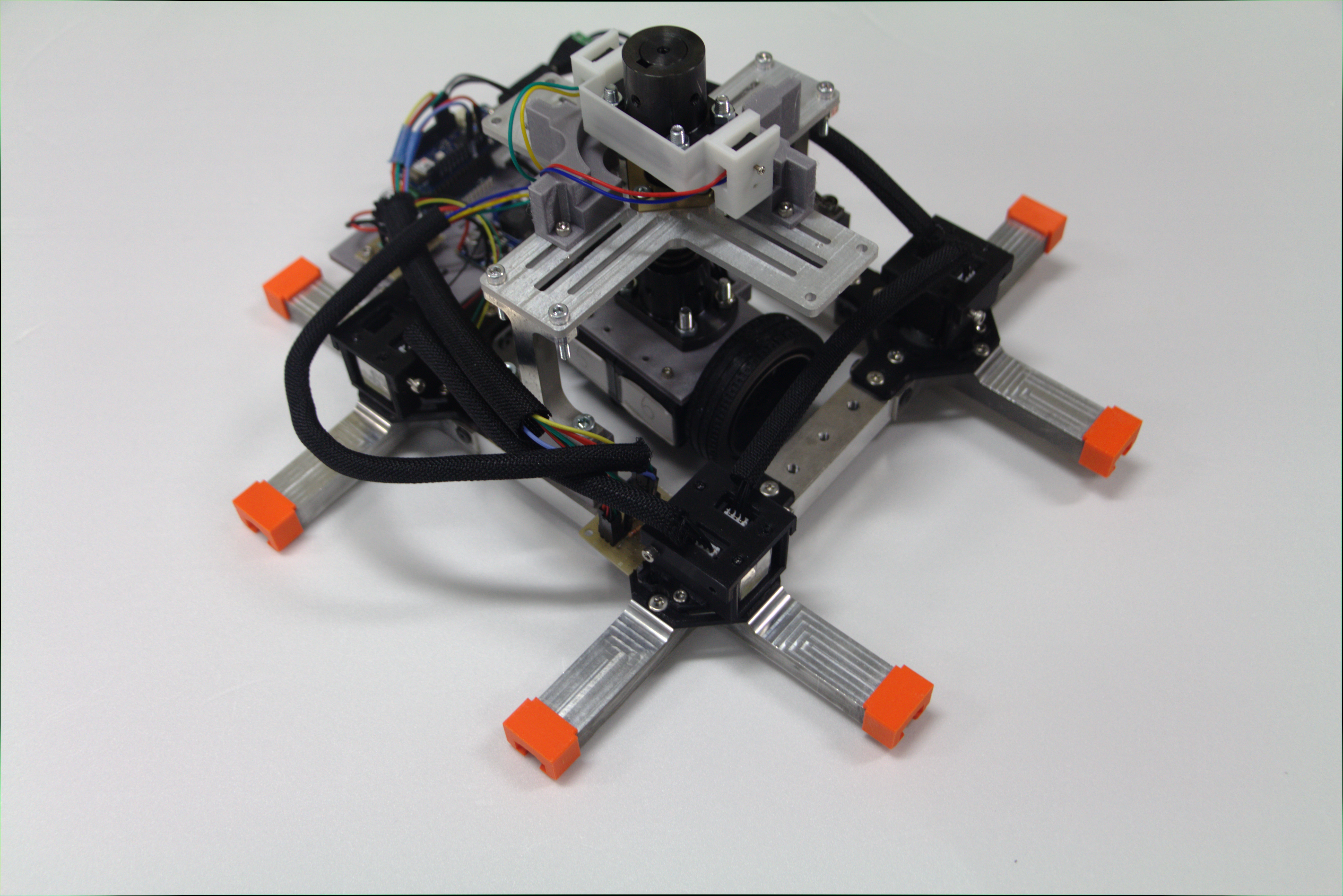
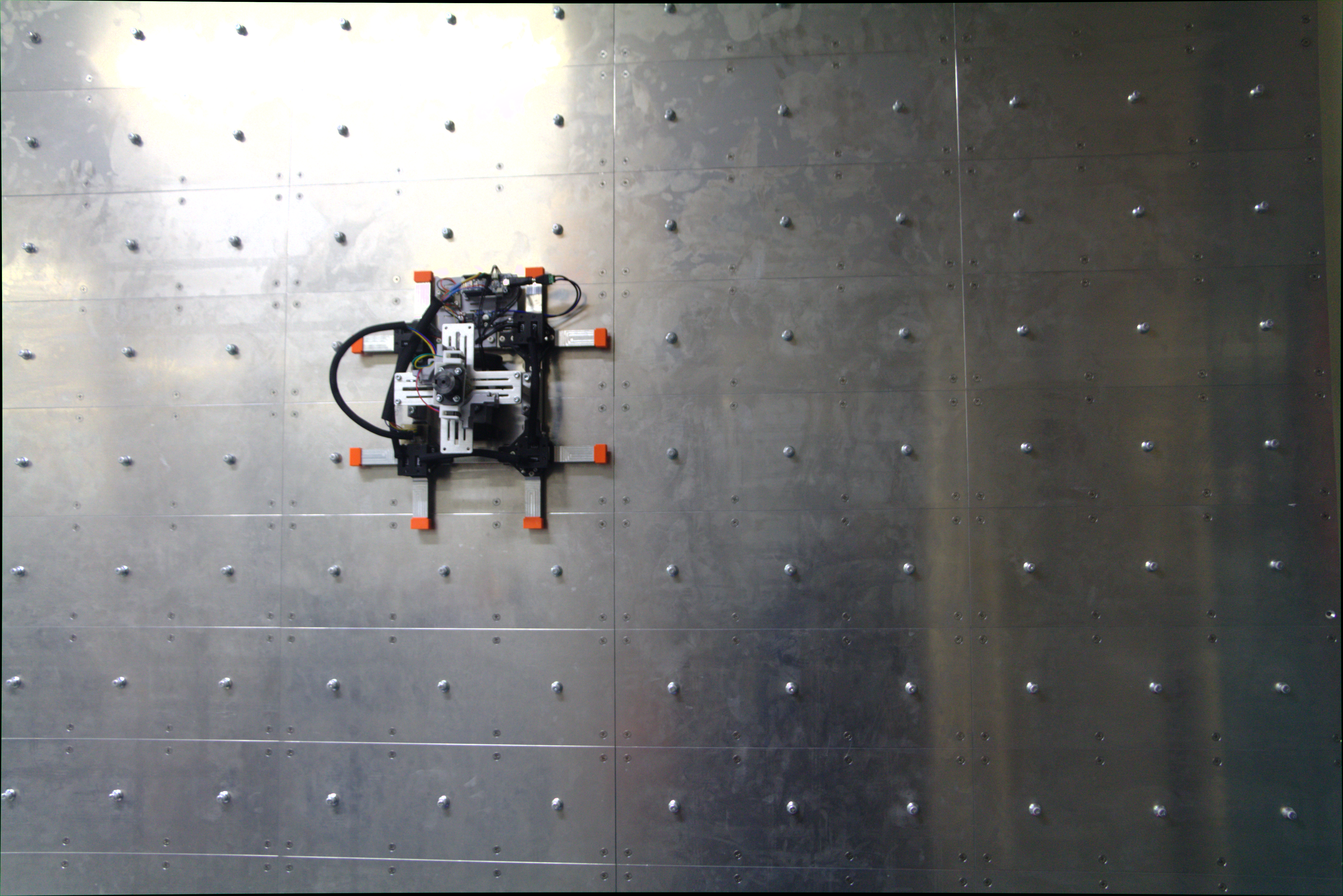
壁・天井を移動するロボットを開発し,それを使った空間内のデバイス移動手法について研究している.本研究室では環境内に埋め込んだカメラなどの様々なセンサを用いて, 環境内の人間に多様なサービスの提供ができる「知能化空間(iSpace)」の研究を行ってきた.既存の iSpaceではデバイスの位置が固定されているといるためセンシングに制限が生じる.この問題を改善するために,移動ロボットを用いて空間内のデバイスを再構成可能にした新しい知能化空間(R+iSpace)の提案がされた.本研究では,移動ロボットに様々なデバイスを搭載して壁面または天井面を自由に移動するロボットを開発することでR+iSpaceの実現を目指す.