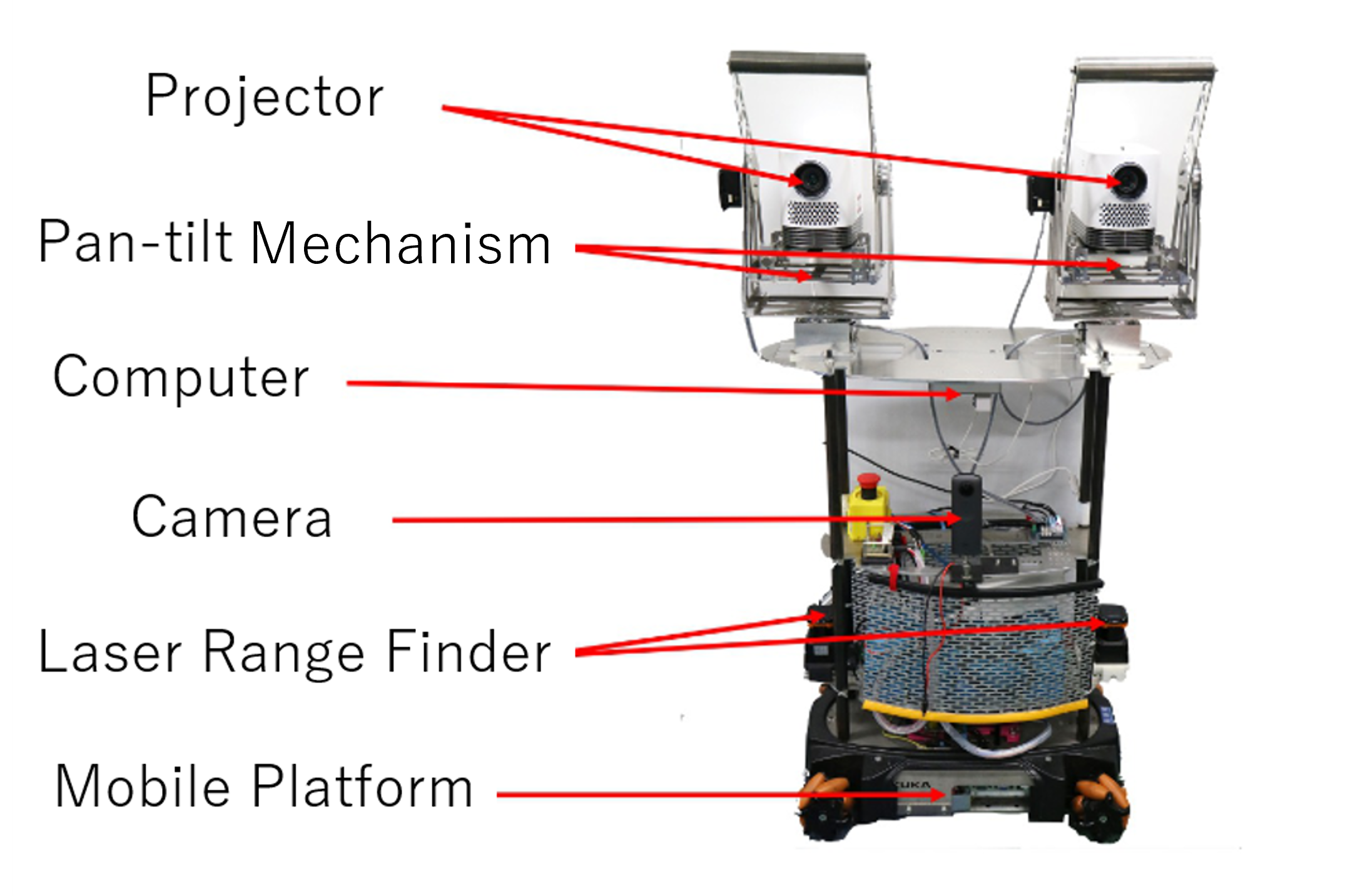
全方向に移動可能な移動機構に上下左右に回転可能なパンチルト機構を備えたプロジェクタを搭載することで,より柔軟な視覚情報の支援を行うロボット「Dual-Ubiquitous Display」(D-UD)を研究している.
近年の情報化社会において,情報を取得する手段は多種多様なものとなってきているため,ユーザから情報を探しに行くのではなく,情報を提供する側からユーザにアプローチしていくことが求められている.本研究では,D-UDを用いて屋内のフロア環境の地図情報を自ら生成し,その情報を基にユーザの道案内機能はもちろん,各場面・客層に応じて効果的な広告投影を行う事で客寄せ効果を生み出す他,ユーザと投影画面を通じてコミュニケーションを取る機能などを追加することで,新たな視覚情報支援サービスの実現を目的として開発している.