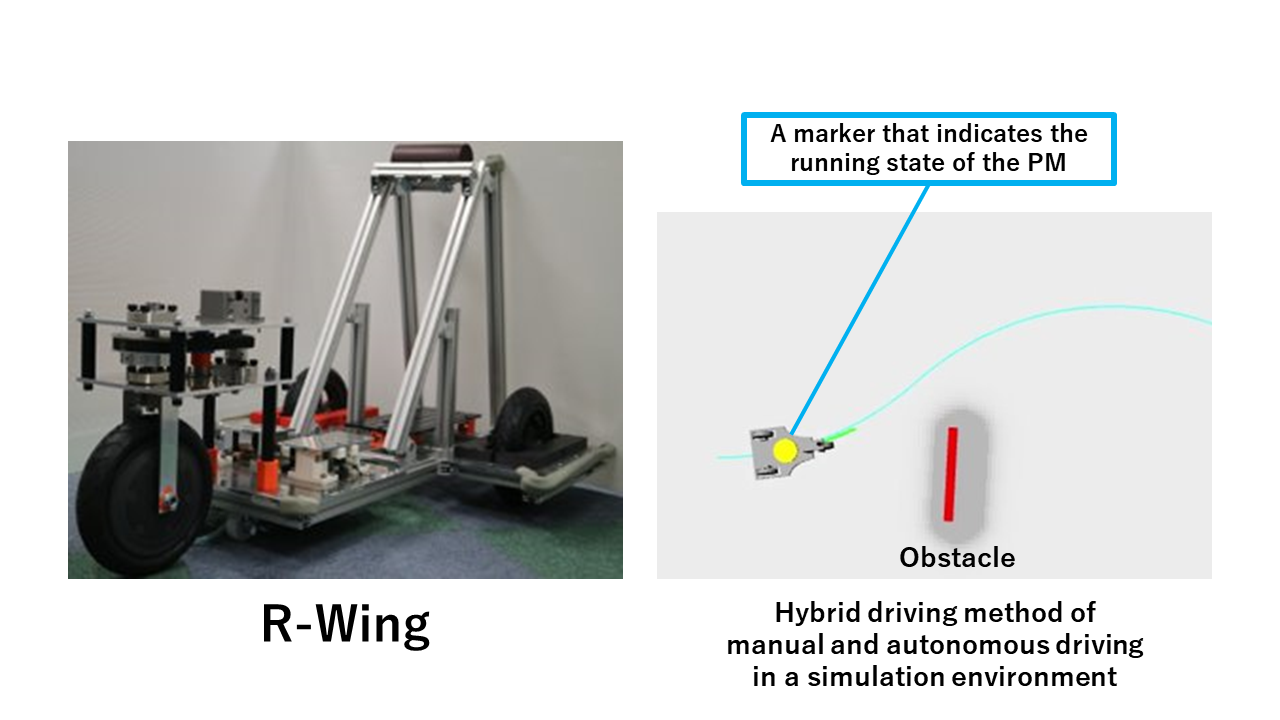
パーソナルモビリティ(PM)の自律走行に関する研究を行っている.基礎研究で開発されたPMは,ユニバーサルデザインとユーザビリティを備えた移動ロボットとなっている.これまで研究開発されてきたPMは,人による手動走行が多く自律走行を搭載したPMは少ない.こうしたことから,システムによる自律走行が,ユーザの移動する際の負担軽減につながると考える. また手動走行と自律走行を組み合わせた,人とシステムによる協調的な制御の実装を行うことで,ユーザの特性や走行環境に合わせた走行が可能となる.そこで本研究では,PM の自律走行による移動の利便性向と,人の操作による制御とシステムによる制御を合わせた協調制御を目指す.