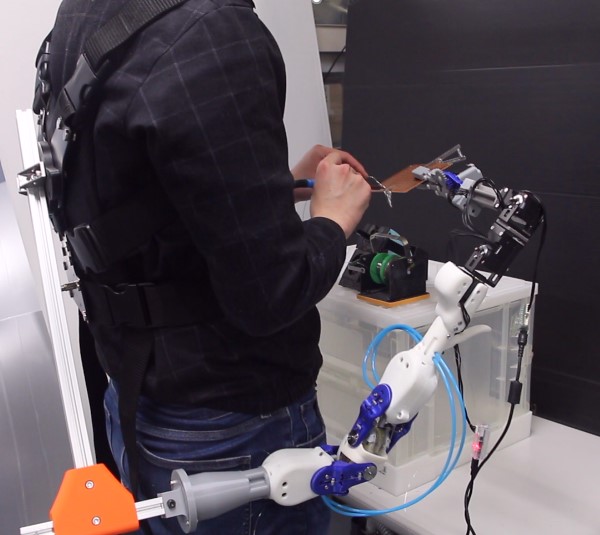
This research aims to improve work efficiency and reduce the burden on workers in users’ daily work, factories, and agricultural work. Therefore, we are studying wearable robotic arms that consider weight bearing and operability.
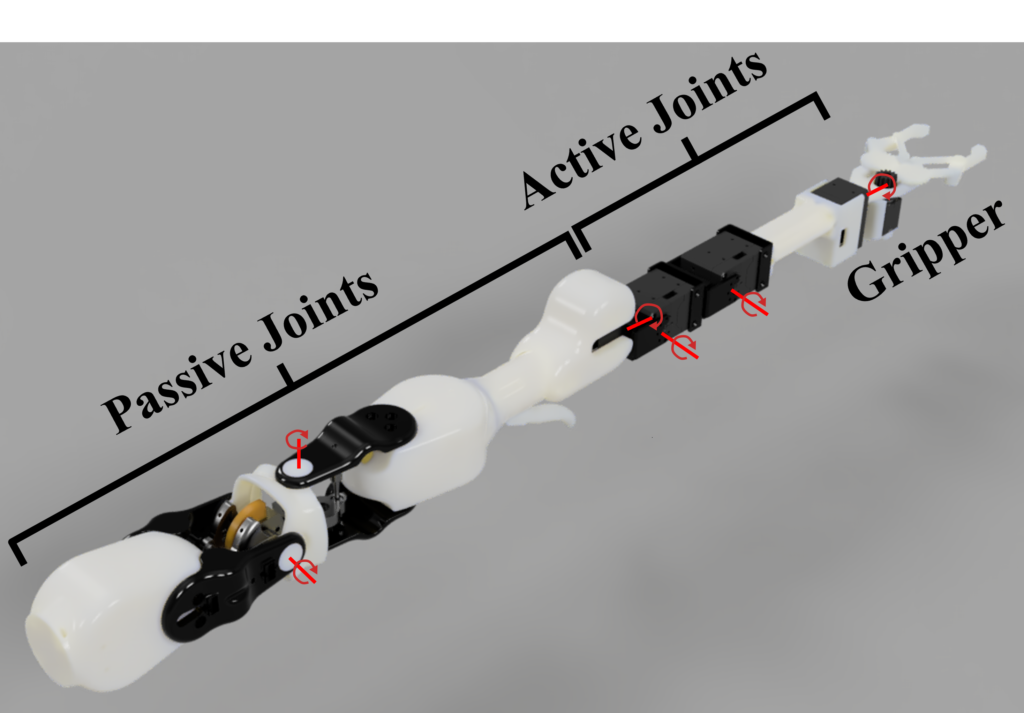
In conventional wearable robotic arms, the greater the range of motion and degree of freedom, the greater the holding torque required for the joints at the root of the robotic arm, and the higher the weight and power of the actuator. As a result, the total weight of the robotic arm increased, placing a heavy burden on the user. In this study, we reduced the power consumption and weight of the robotic arm by using passive joints that physically fix the joint angle instead of using actuators for the root joints, which require sufficient holding torque. In addition, to incorporate its usefulness as a robotic arm, we proposed a safe and lightweight wearable robotic arm by combining an active joint that controls joint angles with an actuator.