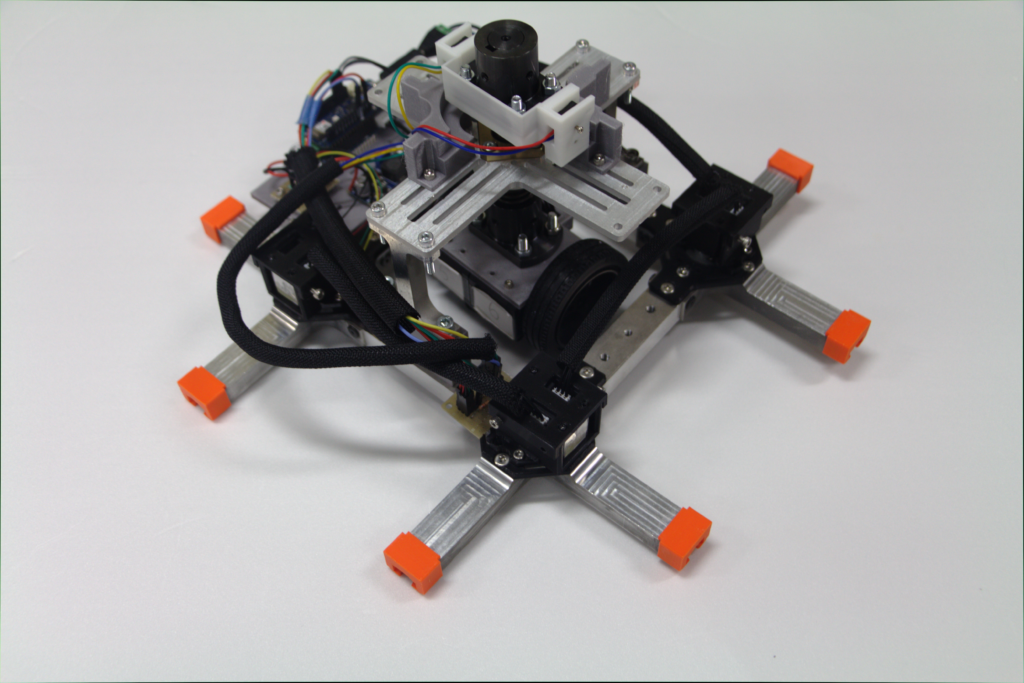
We develop a robot that can move around walls and ceilings and propose methods for robots to move within a space. Our laboratory has conducted research on intelligent spaces (iSpace) that can provide various services to humans in the environment using multiple sensors, such as cameras, microphones, and projectors. To solve the problem of fixed device positions in the existing iSpace, a reconfigurable intelligent space (R+iSpace) has been proposed, in which devices can be relocated in the space by a mobile robot. This research aims to create the R+iSpace by developing a robot equipped with various devices that can move freely on the wall or ceiling.