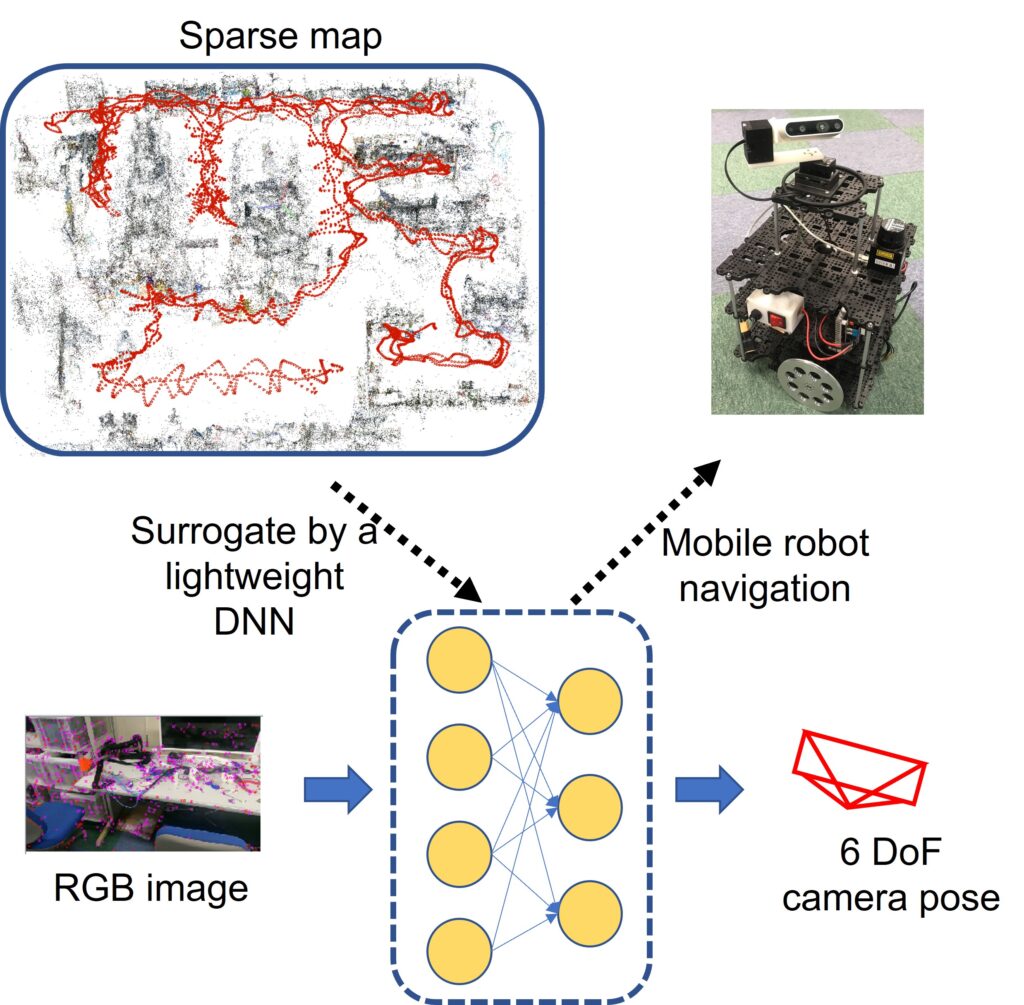
Camera re-localization involving a prior 3D reconstruction plays a crucial role in many mixed reality and robotics applications. Estimating the camera pose directly with respect to pre-built 3D models can be prohibitively expensive for several applications with limited storage and/or communication bandwidth. This study proposes a simple scene regression method that requires only a multi-layer perceptron network for mapping scene coordinates to achieve accurate camera pose estimations. The final re-localization system, therefore, is low-cost to deploy on mobile robots or many other consumer-grade devices owing to limited computational resources.